گیزبو اور URDF کے ساتھ روبوٹ سمولیشن
تعارف
حقیقی ہارڈویئر پر روبوٹکس الگورتھم کی جانچ کرنا مہنگا، وقت طلب اور خطرناک ہے۔ سمولیشن ورچوئل ماحول بنا کر اسے حل کرتی ہے جہاں آپ نتائج کی پرواہ کیے بغیر ٹیسٹ کر سکتے ہیں، اعادہ کر سکتے ہیں اور چیزیں توڑ سکتے ہیں۔ یہ ڈیجیٹل ٹوئن (Digital Twin) کا جوہر ہے۔
اس سبق میں، ہم دو اہم مہارتوں کا احاطہ کریں گے:
- گیزبو (Gazebo): فزکس انجن اور انوائرمنٹ سمیلیٹر۔
- URDF: روبوٹ کی طبعی ساخت کو بیان کرنے کا معیاری طریقہ۔
سیکھنے کے مقاصد
اس سبق کے اختتام تک، آپ اس قابل ہو جائیں گے کہ:
- سمجھیں گیزبو آرکیٹیکچر اور فزکس انجن کو۔
- تخلیق کریں خطوں اور روشنی کے ساتھ کسٹم گیزبو کی دنیا۔
- بیان کریں URDF (لنکس، جوائنٹس، انرشل پراپرٹیز) کا استعمال کرتے ہوئے روبوٹ ماڈلز کو۔
- استعمال کریں XACRO کو ماڈیولر، قابل دیکھ بھال روبوٹ کی تفصیل ینانے کے لیے۔
- ضم کریں ROS 2 کے ساتھ مصنوعی سینسرز (کیمرے، LIDAR) کو۔
گیزبو سمولیشن کے بنیادی اصول
گیزبو انڈسٹری کا معیاری روبوٹ سمیلیٹر ہے۔ یہ کلائنٹ-سرور آرکیٹیکچر پر کام کرتا ہے:
- gzserver: فزکس لوپ اور سینسر جنریشن چلاتا ہے۔
- gzclient: گرافیکل انٹرفیس جو منظر پیش کرتا ہے۔
گیزبو آرکیٹیکچر اور دی برج
گیزبو اپنی ٹرانسپورٹ پرت استعمال کرتا ہے۔ ROS 2 سے بات کرنے کے لیے، ہم ros_gz_bridge استعمال کرتے ہیں۔
graph TB
subgraph "Gazebo Simulation Stack"
ROS2["ROS 2 نوڈز"]
Bridge["ros_gz_bridge"]
Gazebo["Gazebo فزکس"]
Plugins["سینسرز اور ایکچیوٹرز"]
end
ROS2 -->|Topics| Bridge
Bridge -->|gz::msgs| Gazebo
Gazebo --> Plugins
Plugins -->|Sensor Data| Bridge
فزکس انجن
گیزبو ایک سے زیادہ فزکس بیک اینڈز کو سپورٹ کرتا ہے:
- ODE: تیز، مستحکم، عام روبوٹکس کے لیے اچھا (پہلے سے طے شدہ)۔
- Bullet: نرم جسموں کے لیے اچھا ہے۔
- DART: ہیرا پھیری اور ہیومنائیڈز کے لیے اعلی درستگی۔
max_step_size پیرامیٹر تخروپن کی درستگی کی وضاحت کرتا ہے۔ 1ms (0.001s) معیاری ہے۔ تیز روبوٹس کے لیے، 0.5ms استعمال کریں۔
URDF ماڈلنگ
روبوٹ کی تقلید (simulate) کرنے کے لیے، ہمیں اس کی وضاحت کرنی چاہیے۔ ہم URDF (یونیفائیڈ روبوٹ ڈسکشن فارمیٹ) استعمال کرتے ہیں۔ یہ ایک XML فائل ہے جو روبوٹ کی طبعی خصوصیات کی وضاحت کرتی ہے۔
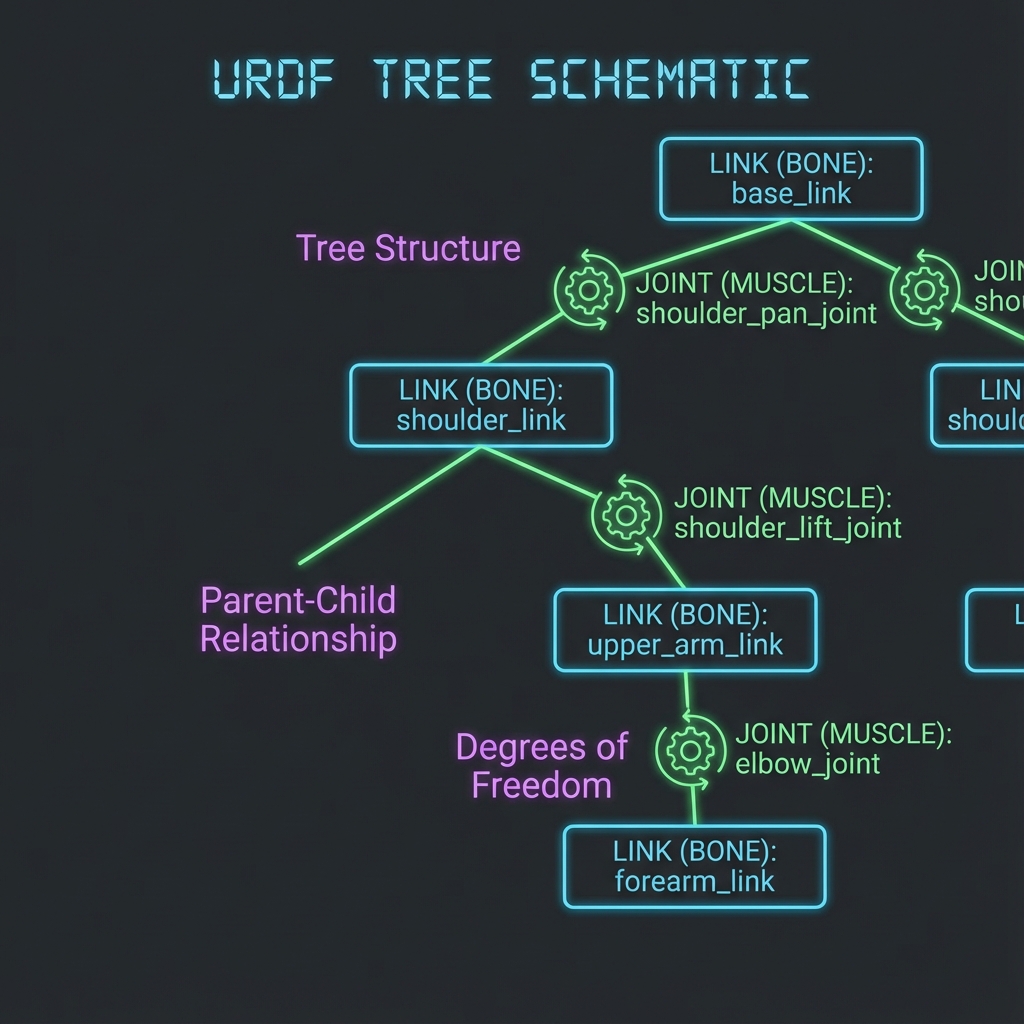
لنکس اور جوائنٹس
- لنک (Link): ایک سخت جسم (جیسے بازو، پہیہ)۔ اس میں ہونا ضروری ہے:
<visual>: یہ کیسا لگتا ہے۔<collision>: فزکس انجن کے لیے طبعی شکل۔<inertial>: ماس اور انرشا ٹینسر۔
- جوائنٹ (Joint): لنکس کے درمیان کنکشن (revolute, continuous, fixed)۔
کم سے کم URDF مثال
<robot name="simple_bot">
<!-- Base Link -->
<link name="base_link">
<visual>
<geometry><box size="0.5 0.3 0.1"/></geometry>
</visual>
<collision>
<geometry><box size="0.5 0.3 0.1"/></geometry>
</collision>
<inertial>
<mass value="5.0"/>
<inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1"/>
</inertial>
</link>
</robot>
اگر آپ <inertial> ٹیگز کو چھوڑ دیتے ہیں، تو گیزبو لنکس کو بے وزن سمجھے گا، جس کی وجہ سے روبوٹ تیرنے یا اڑ جائے گا!
ماڈیولرٹی کے لیے XACRO کا استعمال
خام URDF لکھنے سے ڈپلیکیشن کی اجازت ملتی ہے (مثلاً، 4 ایک جیسے پہیوں کی وضاحت کرنا)۔ XACRO (XML میکرو) اسے حل کرتا ہے۔
مثال: پیرامیٹرائزڈ وہیل میکرو
<xacro:macro name="wheel" params="prefix reflect">
<link name="${prefix}_wheel">
<visual>
<geometry><cylinder radius="0.1" length="0.05"/></geometry>
</visual>
<!-- Collision & Inertial omitted for brevity -->
</link>
<joint name="${prefix}_wheel_joint" type="continuous">
<parent link="base_link"/>
<child link="${prefix}_wheel"/>
<origin xyz="0 ${reflect*0.2} 0" rpy="1.57 0 0"/>
</joint>
</xacro:macro>
<!-- Create two wheels -->
<xacro:wheel prefix="left" reflect="1"/>
<xacro:wheel prefix="right" reflect="-1"/>
سینسرز شامل کرنا
گیزبو میں سینسرز کے لیے دو حصوں کی ضرورت ہوتی ہے:
- URDF تعریف: بصری/طبعی لنک + جوائنٹ۔
- گیزبو پلگ ان: ڈیٹا بنانے اور ROS پر شائع کرنے کے لیے منطق۔
کیمرہ سینسر مثال
<gazebo reference="camera_link">
<sensor type="camera" name="front_camera">
<update_rate>30.0</update_rate>
<camera>
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>600</height>
<format>R8G8B8</format>
</image>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<ros>
<remapping>image_raw:=/camera/image_raw</remapping>
</ros>
</plugin>
</sensor>
</gazebo>
تصور کرنا اور تخروپن کرنا
RViz میں توثیق کرنا
RViz تصور کرتا ہے کہ روبوٹ کیا سوچتا ہے کہ کیا ہو رہا ہے۔ یہ مخصوص مشترکہ ریاستوں کو پڑھنے کے لیے robot_state_publisher کا استعمال کرتا ہے۔
ros2 launch urdf_tutorial display.launch.py model:=my_robot.urdf
گیزبو میں سپوننگ (Spawning)
فزکس کی تقلید کرنے کے لیے، آپ ماڈل کو گیزبو کی دنیا میں سپون (spawn) کرتے ہیں۔
ros2 launch gazebo_ros gazebo.launch.py world:=empty_world.world
ros2 run gazebo_ros spawn_entity.py -entity my_bot -file my_robot.urdf
خود تشخیصی سوالات (Self-Assessment)
-
ہمیں
<visual>سے مختلف<collision>جیومیٹریز کی ضرورت کیوں ہے؟Details
جواب
کارکردگی۔ فزکس انجن پیچیدہ میشز کی نسبت سادہ شکلوں (بکس، سلنڈرز) کے ساتھ تیزی سے کام کرتے ہیں۔ بصری ہائی پولی میچ ہو سکتے ہیں، لیکن تصادم سادہ پرائمیٹوز ہونا چاہیے۔ -
ros_gz_bridgeکا کیا کردار ہے؟Details
جواب
یہ گیزبو کے اندرونی ٹرانسپورٹ سسٹم اور ROS 2 ٹاپکس کے درمیان پیغامات کا ترجمہ کرتا ہے، جس سے آپ کے ROS نوڈز گیزبو سینسر ڈیٹا کو دیکھ سکتے ہیں۔ -
URDF کی بجائے XACRO کیوں استعمال کریں؟
Details
جواب
XACRO متغیرات، میکرو اور ریاضی کے استعمال کی اجازت دیتا ہے تاکہ کوڈ کی نقل کو کم کیا جا سکے اور قابل دیکھ بھال، پیرامیٹرائزڈ روبوٹ کی تفصیلات بنائی جا سکیں۔
خلاصہ
آپ نے سیکھا ہے کہ روبوٹ کا ڈیجیٹل ٹوئن کیسے بنایا جائے:
- گیزبو طبیعیات اور عالمی تخروپن فراہم کرتا ہے۔
- URDF روبوٹ کی طبعی ساخت (لنکس/جوائنٹس) کی وضاحت کرتا ہے۔
- XACRO ماڈلنگ کو ماڈیولر بناتا ہے۔
- سینسرز ورچوئل دنیا کو آپ کے ROS 2 الگورتھم سے جوڑتے ہیں۔