فزیکل AI کا تعارف
تعارف
فزیکل AI (جسمانی مصنوعی ذہانت) کی دلچسپ دنیا میں خوش آمدید! جبکہ روایتی AI سسٹمز خالصتاً ڈیجیٹل دائرے میں کام کرتے ہیں—ڈیٹا پروسیس کرنا، پیشین گوئیاں کرنا، اور ٹیکسٹ یا تصاویر بنانا—فزیکل AI ایک پیراڈائم شفٹ کی نمائندگی کرتا ہے جہاں ذہانت طبعی دنیا سے ملتی ہے۔ یہ سسٹمز صرف سوچتے نہیں ہیں؛ یہ اپنے ماحول کو محسوس کرتے ہیں، حرکت کرتے ہیں اور حقیقی وقت میں اس کے ساتھ تعامل کرتے ہیں۔
ڈیجیٹل AI (جیسے ChatGPT) کے برعکس جو ٹیکسٹ اور ٹوکنز کی دنیا میں کام کرتا ہے، فزیکل AI کو کشش ثقل، رگڑ، اور حقیقی دنیا کی غیر یقینی صورتحال سے نمٹنا پڑتا ہے۔
سیکھنے کے مقاصد
اس سبق کے اختتام تک، آپ اس قابل ہو جائیں گے کہ:
- تعریف کریں کہ فزیکل AI کیا ہے اور یہ کس طرح روایتی سافٹ ویئر پر مبنی AI سسٹمز سے مختلف ہے۔
- شناخت کریں مجسم ذہانت کے تین بنیادی اجزاء کو: ادراک (Perception)، ادراک/سوچ (Cognition)، اور عمل (Action)۔
- سمجھیں ان منفرد چیلنجز کو جو AI سسٹمز کے طبعی دنیا کے ساتھ تعامل کرنے پر پیدا ہوتے ہیں۔
- وضاحت کریں خود مختار روبوٹک سسٹمز میں سینس-تھنک-ایکٹ (sense-think-act) لوپ کی اہمیت۔
فزیکل AI کیا ہے؟
فزیکل AI سے مراد وہ مصنوعی ذہانت کے نظام ہیں جو طبعی شکلوں میں مجسم ہوتے ہیں—عام طور پر روبوٹس—اور وہ حقیقی دنیا کو دیکھ سکتے ہیں، اس کے بارے میں استدلال کر سکتے ہیں، اور اس کے ساتھ تعامل کر سکتے ہیں۔
فزیکل AI بمقابلہ ڈیجیٹل AI
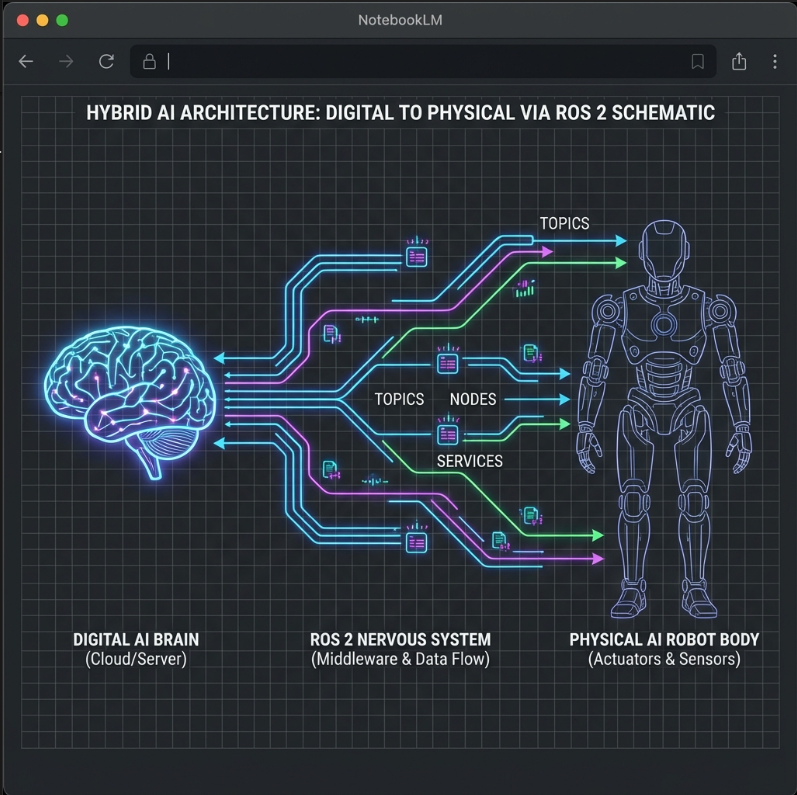
ڈیجیٹل AI سے فزیکل AI میں منتقلی میں "Cloud" سے "Edge" کی طرف جانا شامل ہے۔
| خصوصیت | ڈیجیٹل AI | فزیکل AI |
|---|---|---|
| ماحول | مستحکم / ڈیجیٹل | متحرک / طبعی |
| ان پٹ | ٹیکسٹ / تصاویر | سینسر ڈیٹا (LIDAR, IMU) |
| آؤٹ پٹ | ٹیکسٹ / پکسلز | موٹر ٹارک / ایکشن |
| ناکامی کی قیمت | غلط ٹیکسٹ | جسمانی نقصان |
فزیکل AI کے تین ستون
فزیکل AI سسٹمز تین باہم مربوط ستونوں پر بنائے گئے ہیں: ادراک (Perception)، سوچ (Cognition)، اور عمل (Action)۔
1. ادراک (Sensing)
دنیا کے ساتھ تعامل کرنے کے لیے، ایک روبوٹ کو حواس کی ضرورت ہوتی ہے۔ ہم انہیں سینسرز (Sensors) کہتے ہیں۔
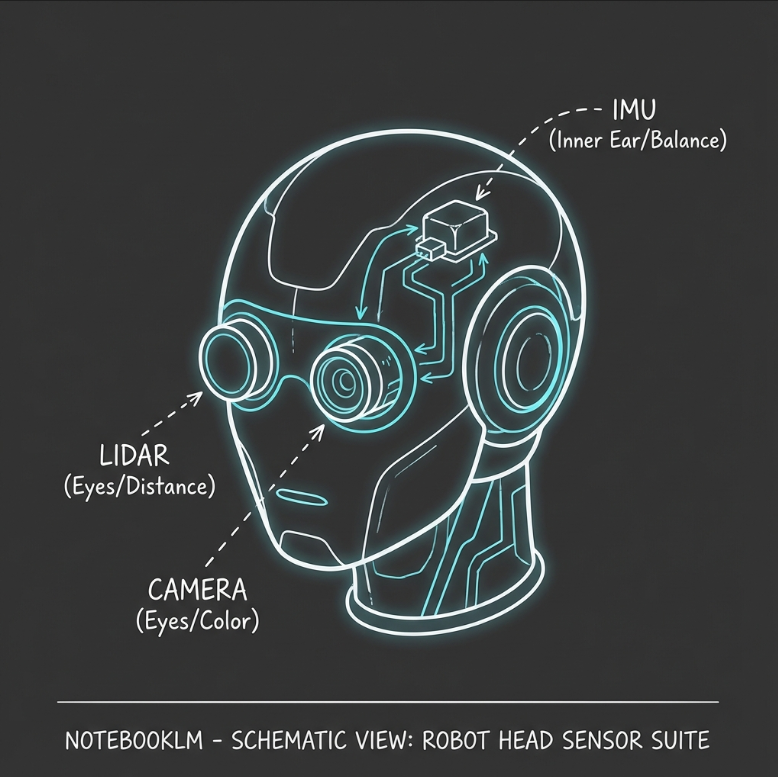
اہم سینسرز میں شامل ہیں:
- LIDAR: درست فاصلے کی پیمائش اور 3D نقشے بنانے کے لیے لیزرز۔
- کیمرے (RGB اور Depth): بصری سیاق و سباق اور گہرائی کا ادراک فراہم کرتے ہیں۔
- IMU (Inertial Measurement Unit): ایکسلریشن اور گردش کی پیمائش کرتا ہے (جیسے اندرونی کان) توازن کے لیے۔
- Proprioception: اندرونی حالت کی پیمائش کرنے والے سینسرز، جیسے جوڑوں کے زاویے اور موٹر کرنٹ۔
2. سوچ (Cognition)
ایک بار جب سینسری ڈیٹا اکٹھا ہو جاتا ہے، تو روبوٹ کو اسے پروسیس کرنا چاہیے تاکہ:
- خود کو لوکیٹ کرے (میں کہاں ہوں؟)۔
- ماحول کا نقشہ بنائے (دنیا کیسی دکھتی ہے؟)۔
- اعمال کی منصوبہ بندی کرے (میں مقصد تک کیسے پہنچوں؟)۔
- غیر یقینی صورتحال کے بارے میں استدلال کرے اور فیصلے کرے۔
3. عمل (Action)
آخر میں، روبوٹ کو Actuators (موٹرز، گرپرز، پٹھوں) کے ذریعے طبعی دنیا میں اعمال انجام دینے چاہئیں۔ اعمال سادہ حرکت (چلنا، رول کرنا) سے لے کر پیچیدہ ہیرا پھیری (پکڑنا، اسمبل کرنا) تک ہو سکتے ہیں۔
فزیکل AI کے اعمال کے نتائج ہوتے ہیں۔ سافٹ ویئر کے انڈو (undo) بٹن کے برعکس، طبعی غلطی (جیسے کوئی چیز گرانا) کو آسانی سے کالعدم نہیں کیا جا سکتا۔
فزیکل AI کے منفرد چیلنجز
- حقیقی دنیا کی پیچیدگی: حقیقی دنیا گندی ہے۔ سینسرز میں شور ہوتا ہے، روشنی تبدیل ہوتی ہے، اور طبیعیات (رگڑ، کشش ثقل) بے رحم ہے۔
- ریئل ٹائم صلاحیتیں: ایک روبوٹ کو فوری طور پر ردعمل ظاہر کرنا چاہیے۔ تاخیر خطرناک ہو سکتی ہے—بریک لگانے میں تاخیر حادثے کا سبب بن سکتی ہے۔
- سمولیشن سے حقیقت کا فرق (Sim-to-Real Gap): بہترین سیمولیشنز میں تربیت یافتہ ماڈل اکثر ٹھیک طبعی اختلافات کی وجہ سے حقیقی دنیا میں ناکام ہو جاتے ہیں۔
حقیقی دنیا کے اطلاقات (Applications)
- مینوفیکچرنگ: کوبوٹس (cobots) جو انسانوں کے ساتھ مل کر کام کرتے ہیں۔
- صحت کی دیکھ بھال: سرجیکل روبوٹس اور بحالی کے لیے exoskeletons۔
- زراعت: خود مختار فصل کی کٹائی اور نگرانی کرنے والے ڈرونز۔
- ایکسپلوریشن: مریخ پر چلنے والے روورز یا انفراسٹرکچر کا معائنہ کرنے والے پانی کے اندر ڈرونز۔
دی سینس-تھنک-ایکٹ لوپ (Sense-Think-Act Loop)
ہر فزیکل AI سسٹم کے دل میں سینس-تھنک-ایکٹ لوپ ہوتا ہے:
- سینس: سینسرز سے ڈیٹا اکٹھا کریں۔
- تھنک: ڈیٹا کو پروسیس کریں، ورلڈ ماڈل کو اپ ڈیٹ کریں، ایکشن کا منصوبہ بنائیں۔
- ایکٹ: موٹر کمانڈز پر عمل کریں۔
- دہرائیں: یہ مسلسل ہوتا ہے، اکثر 10-100 بار فی سیکنڈ (Hz)۔
graph LR
A[سینس: سینسرز] -->|خام ڈیٹا| B[تھنک: AI اور پلاننگ]
B -->|کمانڈز| C[ایکٹ: ایکچیوٹرز]
C -->|فیڈ بیک| A
style A fill:#a855f7,stroke:#9333ea,stroke-width:2px,color:#fff
style B fill:#ec4899,stroke:#db2777,stroke-width:2px,color:#fff
style C fill:#06b6d4,stroke:#0891b2,stroke-width:2px,color:#fff
Python کوڈ مثال: دی لوپ
یہاں کوڈ میں اس لوپ کی ایک تصوراتی مثال ہے:
import time
import random
class Robot:
def __init__(self):
# Initialize sensors and actuators
self.lidar_range = 10.0
def sense(self):
"""Gather sensor data (Sensors)"""
# Simulate sensor noise and reading
noise = random.uniform(-0.1, 0.1)
actual_distance = 5.0
return max(0.0, actual_distance + noise)
def think(self, sensor_data):
"""Process data and plan (Cognition)"""
# Simple logic: avoid obstacles closer than 1 meter
if sensor_data < 1.0:
return "STOP"
else:
return "MOVE_FORWARD"
def act(self, command):
"""Execute command (Actuators)"""
print(f"Action: {command}")
def run(self, frequency_hz=1):
"""Main control loop"""
period = 1.0 / frequency_hz
print(f"Starting Control Loop at {frequency_hz} Hz...")
try:
while True:
start_time = time.time()
# 1. SENSE
data = self.sense()
print(f"Sensor: {data:.2f}m", end=" | ")
# 2. THINK
decision = self.think(data)
# 3. ACT
self.act(decision)
# Maintain loop frequency
elapsed = time.time() - start_time
if elapsed < period:
time.sleep(period - elapsed)
except KeyboardInterrupt:
print("\nStopping robot.")
if __name__ == "__main__":
bot = Robot()
bot.run()
خود تشخیصی سوالات (Self-Assessment)
-
فزیکل AI کو روایتی سافٹ ویئر پر مبنی AI سے کیا چیز ممتاز کرتی ہے؟
Details
جواب
فزیکل AI روبوٹس میں مجسم ہوتا ہے اور حقیقی دنیا کے ساتھ تعامل کرتا ہے، طبیعیات اور ریئل ٹائم رکاوٹوں سے نمٹتا ہے۔ روایتی AI ڈیجیٹل، مستحکم ماحول میں کام کرتا ہے۔ -
فزیکل AI کے تین ستونوں کے نام بتائیں۔
Details
جواب
ادراک (Sensing)، سوچ (Thinking)، اور عمل (Actuation)۔ -
ریئل ٹائم پروسیسنگ کیوں اہم ہے؟
Details
جواب
کیونکہ طبعی واقعات مسلسل ہوتے رہتے ہیں۔ سینسر ڈیٹا کو پروسیس کرنے میں تاخیر تصادم یا ناکامی کا باعث بن سکتی ہے کیونکہ جب روبوٹ "سوچ" رہا ہوتا ہے تو ماحول بدل جاتا ہے۔
خلاصہ
فزیکل AI کے لیے مجسم ذہانت (Embodied Intelligence) کی ضرورت ہوتی ہے—جسمانی جسم اور ماحول کی رکاوٹوں کا احترام کرتے ہوئے منصوبہ بندی اور عمل کرنے کی صلاحیت۔ یہ مسلسل سینس-تھنک-ایکٹ لوپ پر کام کرتا ہے اور یہ تبدیل کر رہا ہے کہ مشینیں حقیقی دنیا میں ہماری مدد کیسے کرتی ہیں۔