Humanoid Robot Development
Introduction
Building a humanoid robot is one of the grand challenges of robotics. Unlike wheeled robots, bipeds are inherently unstable. They must constantly fight gravity to stay upright.
In this lesson, we will focus on Unitree G1, a modern humanoid research platform, and the software stack required to make it walk, balance, and interact.
Learning Objectives
By the end of this lesson, you will be able to:
- Understand humanoid architectures (23+ DoF).
- Implement Whole-Body Control (WBC) for balance.
- Generate stable walking gaits.
- Configure safety systems for real-world testing.
Unitree G1 Platform Overview
The Unitree G1 is a capable humanoid platform with the following specs:
- Height: 130 cm
- DoF: 23-43 (Configurable)
- Compute: NVIDIA Jetson Orin (Perception) + Real-time Microcontrollers (Control)
- Sensors: 3D LIDAR, Depth Cameras, IMU, Force Sensors.
Software Stack
The control stack is layered:
- High-Level: ROS 2 (Navigation, VLA) running on Jetson.
- Mid-Level: Whole-Body Controller (Walking, Balance) running on real-time PC.
- Low-Level: Motor bridging (Torque control) running on MCUs.
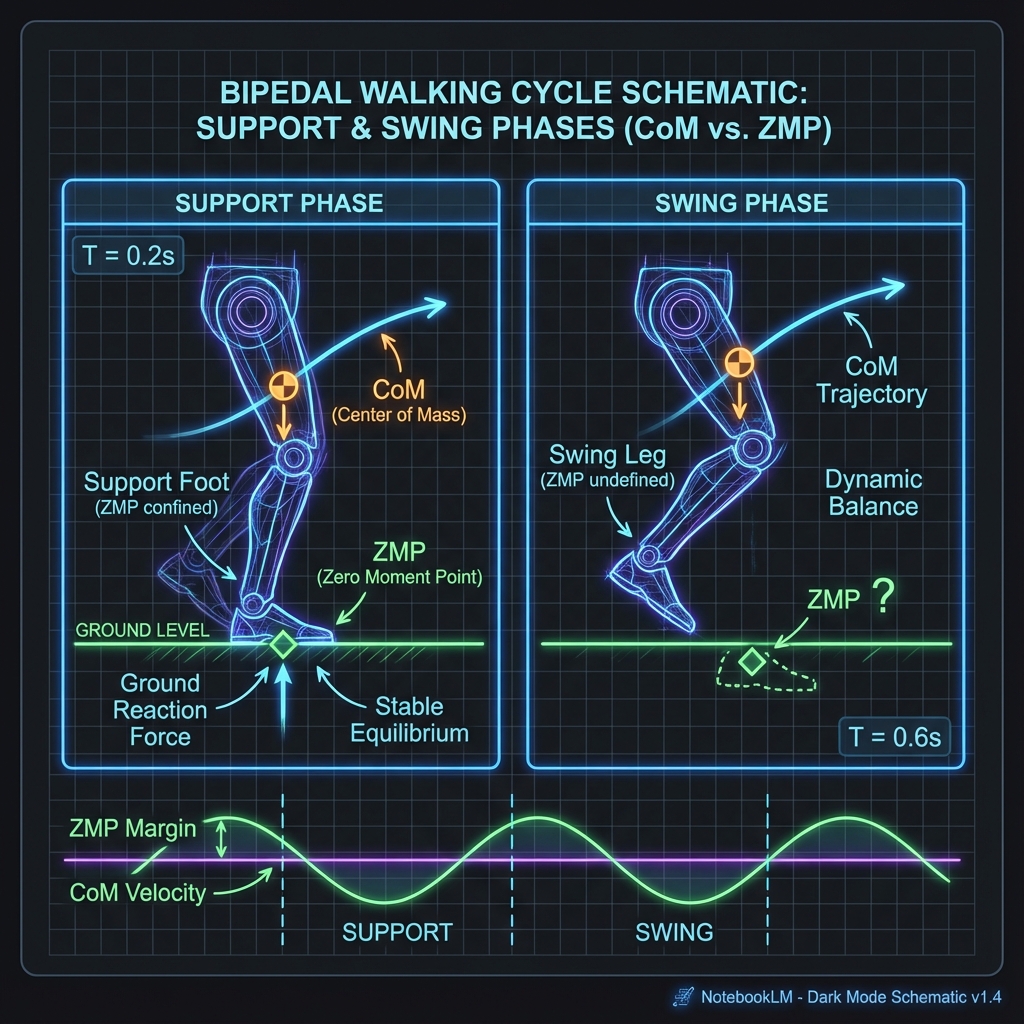
Bipedal Locomotion
Walking is essentially "controlled falling". We use the Zero Moment Point (ZMP) concept to maintain stability.
Control Loop Architecture
graph TB
Task["Desired Task<br/>(Walk Forward)"] --> IK["Inverse Kinematics"]
IK --> WBC["Whole-Body Controller"]
WBC --> Torque["Torque Command"]
Torque --> Motors
Motors --> IMU["IMU Feedback"]
IMU --> WBC
Code Example: Balance Controller
A simple PID controller isn't enough for a full humanoid, but it illustrates the concept of correcting pitch errors.
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Imu
from std_msgs.msg import Float64MultiArray
import numpy as np
class BalanceController(Node):
def __init__(self):
super().__init__('balance_controller')
self.imu_sub = self.create_subscription(Imu, '/imu/data', self.imu_cb, 10)
self.cmd_pub = self.create_publisher(Float64MultiArray, '/joint_commands', 10)
self.kp = 50.0 # Proportional Limit
self.kd = 10.0 # Damping
self.target_pitch = 0.0
def imu_cb(self, msg):
# Extract pitch (simplified)
current_pitch = 2 * np.arcsin(msg.orientation.y)
pitch_rate = msg.angular_velocity.y
# PD Control
error = self.target_pitch - current_pitch
torque = (self.kp * error) + (self.kd * (-pitch_rate))
# Publish torque to ankles
self.publish_torque(torque)
def publish_torque(self, torque):
msg = Float64MultiArray()
msg.data = [0.0] * 23 # Initialize all joints
msg.data[12] = torque # Left Ankle
msg.data[18] = torque # Right Ankle
self.cmd_pub.publish(msg)
Safety Systems
Real robots are dangerous. You need layers of safety:
- Fall Detection: If pitch > 30 degrees, kill motors immediately.
- Self-Collision: Use URDF to check if arms will hit legs.
- Emergency Stop: Physical button and software service.
Humanoid robots are heavy and can fall unexpectedly. Always use a gantry or safety harness when testing balance algorithms on real hardware.
Summary
Humanoid development combines high-level AI with low-level physics:
- WBC keeps the robot upright.
- ZMP ensures dynamic stability during walking.
- Safety is paramount when code meets 35kg of metal.