The AI-Robot Brain (NVIDIA Isaac)
Introduction
While Gazebo excels at general-purpose simulation, NVIDIA Isaac is purpose-built for AI-powered robotics at scale. It leverages the power of NVIDIA GPUs to provide photorealistic rendering (Ray Tracing) and massive parallel physics simulation.
But it's not just a simulator. The Isaac Platform includes Isaac ROS—a suite of hardware-accelerated packages that run on your robot's NVIDIA Jetson computer, making it essentially a "supercomputer on wheels".
Learning Objectives
By the end of this module, you will be able to:
- Understand the Isaac ecosystem (Sim vs. ROS).
- Generate synthetic data to train AI models without manual labeling.
- Deploy GPU-accelerated perception pipelines (VSLAM, Object Detection).
- Utilize advanced motion planning with cuMotion.
The Isaac Ecosystem
The platform consists of two main pillars:
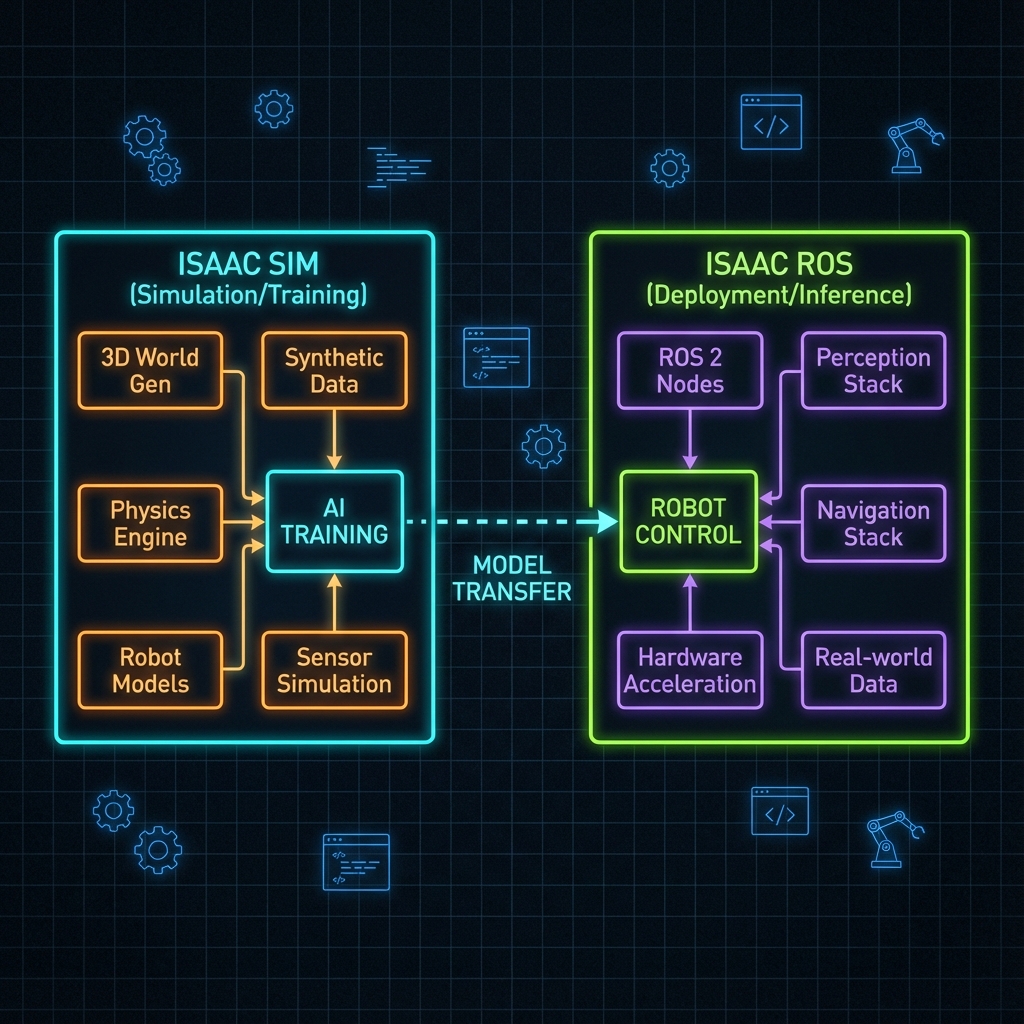
- Isaac Sim: Built on NVIDIA Omniverse. Used for:
- Digital Twins: Photorealistic worlds.
- Synthetic Data Generation: Training AI models.
- Reinforcement Learning: Training robots to walk/grasp in sim.
- Isaac SDK / Isaac ROS: Hardware-accelerated ROS 2 packages. Used for:
- Perception: VSLAM, Depth estimation, Object detection.
- Navigation: High-speed path planning.
Isaac Sim & Synthetic Data
Training computer vision models requires thousands of labeled images. Manual labeling is slow and expensive.
Synthetic Data solves this. Isaac Sim generates perfectly labeled data (Bounding boxes, Segmentation masks, Depth) instantly.
Domain Randomization
To prevent the AI from "memorizing" the simulation, we use Domain Randomization:
- Randomize lighting (Sun position, color).
- Randomize textures (Walls, floors).
- Randomize camera noise.
This forces the AI to learn robust features that work in the messy real world.
Isaac ROS: Perception Pipeline
Isaac ROS moves the heavy lifting from the CPU to the GPU (CUDA + TensorRT).
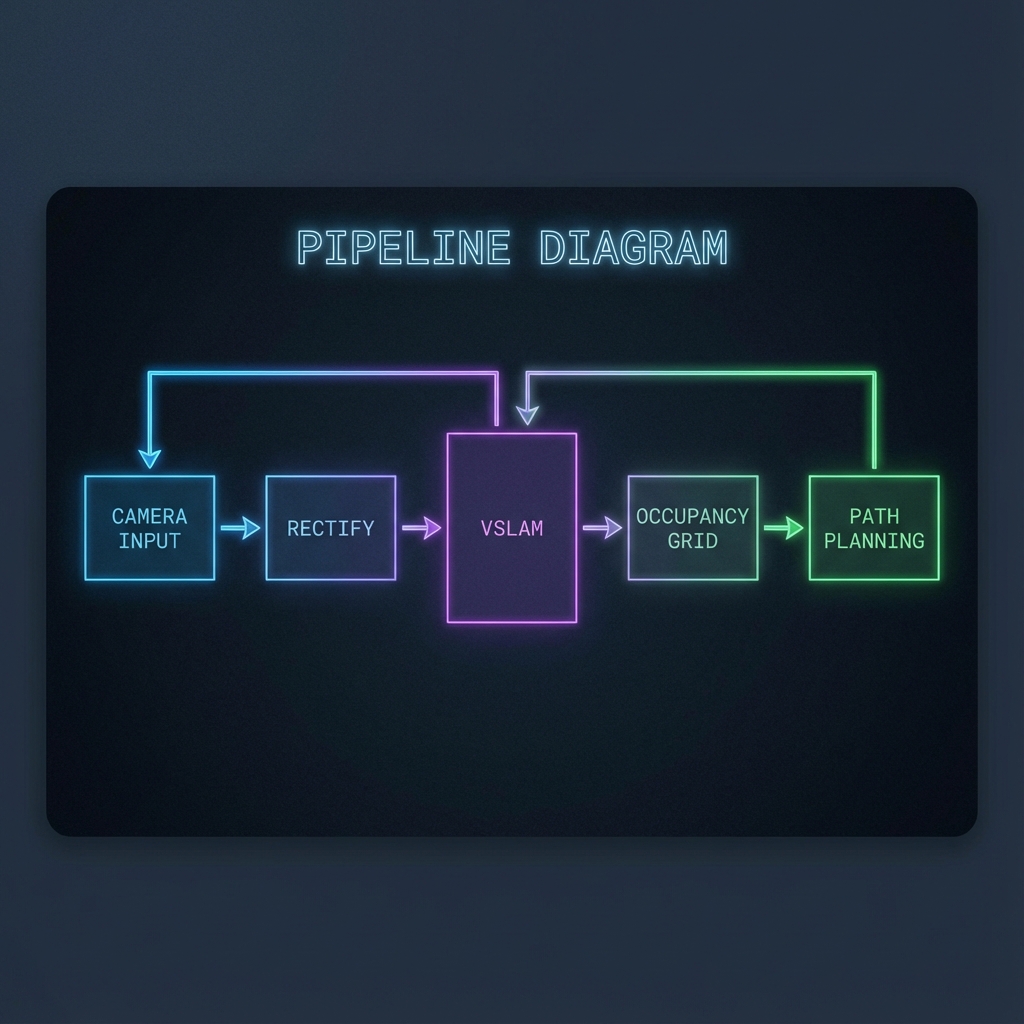
Key Packages
- VSLAM (Visual SLAM): GPU-accelerated localization using stereo cameras.
- Nvblox: Builds 3D maps for collision avoidance.
- TensorRT Inference: Runs deep learning models (YOLO, PeopleNet) 10x faster than CPU.
Code Example: Configuring VSLAM for Jetson
from launch import LaunchDescription
from launch_ros.actions import ComposableNodeContainer
from launch_ros.descriptions import ComposableNode
def generate_launch_description():
vslam_node = ComposableNode(
package='isaac_ros_visual_slam',
plugin='nvidia::isaac_ros::visual_slam::VisualSlamNode',
name='visual_slam_node',
parameters=[{
'enable_rectified_pose': True,
'enable_imu_fusion': True, # Fuse IMU for better accuracy
'denoise_input_images': False,
}],
remappings=[
('stereo_camera/left/image_rect', '/camera/left/image_rect'),
('stereo_camera/right/image_rect', '/camera/right/image_rect'),
]
)
# ... container setup ...
return LaunchDescription([container])
Advanced Features
TensorRT Optimization
Neural networks are often trained in PyTorch or TensorFlow. TensorRT optimizes them for NVIDIA hardware by:
- Fusing layers.
- Calibrating precision (FP16 or INT8).
- Tuning kernels for specific GPUs.
cuMotion: Fast Motion Planning
Traditional planners (MoveIt/OMPL) run on CPU and can be slow for complex arms. cuMotion runs on GPU, checking thousands of collision paths in parallel. It can plan safe trajectories for a 7-DOF arm in milliseconds.
graph LR
User -->|Target Pose| MoveIt
MoveIt -->|Request| cuMotion
cuMotion -->|Parallel Compute| GPU
GPU -->|Traj| cuMotion
cuMotion -->|Solution| Robot
Self-Assessment Questions
-
Why use Isaac Sim over Gazebo?
Details
Answer
Isaac Sim offers photorealistic rendering (critical for vision training) and GPU-accelerated physics (simulating 100+ robots). Gazebo is better for general, low-fidelity simulation. -
What is the "Sim-to-Real" gap?
Details
Answer
The difference between simulation and reality. Models trained in sim fail in real life due to perfect physics/lighting in sim. We use Domain Randomization to bridge this gap. -
Why is TensorRT important for robots?
Details
Answer
Robots have limited compute/battery (like a Jetson Nano). TensorRT optimizes AI models to run faster and use less power, enabling real-time perception.
Summary
The AI-Robot Brain relies on high-performance compute:
- Isaac Sim trains the brain in a virtual world.
- Isaac ROS runs the brain on the physical robot using GPU acceleration.
- Synthetic Data provides the fuel (labeled images) for learning.