Introduction to Physical AI
Introduction
Welcome to the exciting world of Physical AI! While traditional AI systems operate purely in the digital realm—processing data, making predictions, and generating text or images—Physical AI represents a paradigm shift where intelligence meets the physical world. These systems don't just think; they sense, move, and interact with their environment in real-time.
Unlike digital AI (like ChatGPT) which operates in a world of text and tokens, Physical AI must deal with gravity, friction, and the unpredictability of the real world.
Learning Objectives
By the end of this lesson, you will be able to:
- Define Physical AI and explain how it differs from traditional software-based AI systems.
- Identify the three core components of embodied intelligence: perception, cognition, and action.
- Understand the unique challenges that arise when AI systems interact with the physical world.
- Explain the importance of the sense-think-act loop in autonomous robotic systems.
What is Physical AI?
Physical AI refers to artificial intelligence systems that are embodied in physical forms—typically robots—and can perceive, reason about, and interact with the real world.
Physical AI vs. Digital AI
The transition from Digital AI to Physical AI involves moving from "The Cloud" to "The Edge".
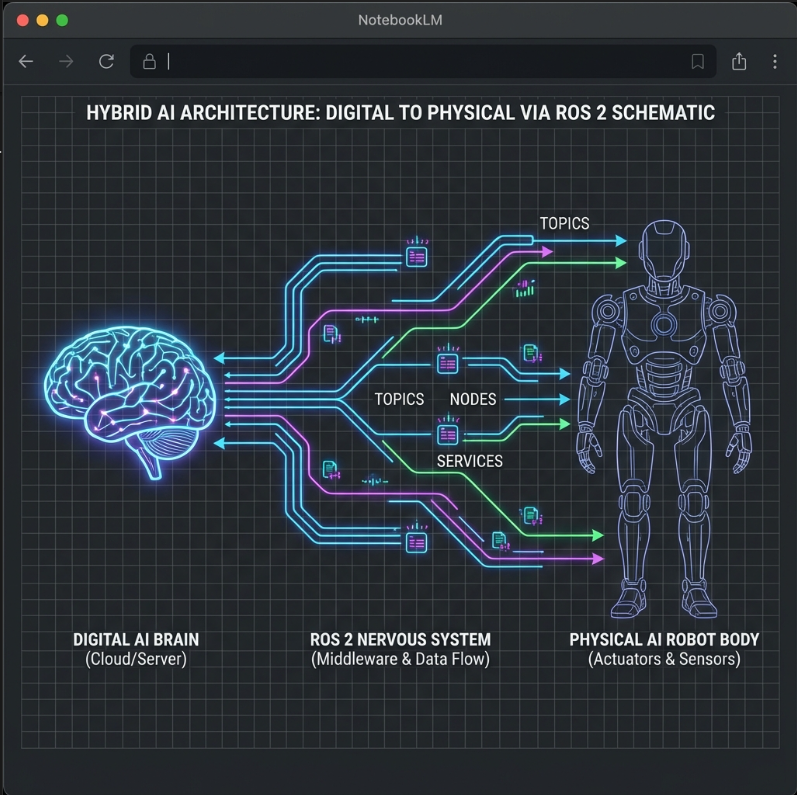
| Feature | Digital AI | Physical AI |
|---|---|---|
| Environment | Static / Digital | Dynamic / Physical |
| Input | Text / Images | Sensor Data (LIDAR, IMU) |
| Output | Text / Pixels | Motor Torques / Action |
| Cost of Failure | Incorrect Text | Physical Damage |
The Three Pillars of Physical AI
Physical AI systems are built on three interconnected pillars: Perception, Cognition, and Action.
1. Perception (Sensing)
To interact with the world, a robot needs senses. We call these Sensors.
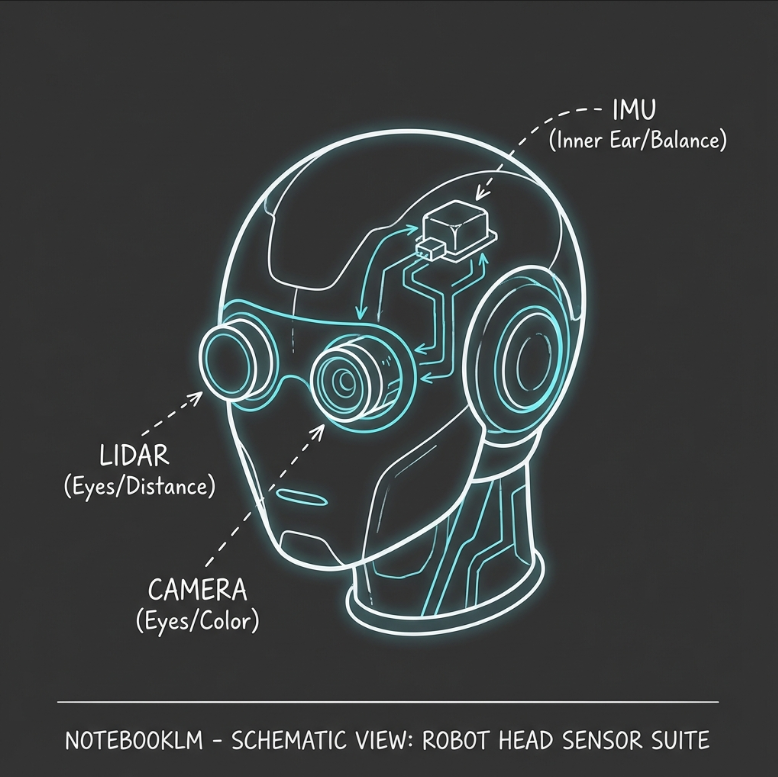
Key sensors include:
- LIDAR (Light Detection and Ranging): Lasers used to measure precise distances and create 3D maps.
- Cameras (RGB & Depth): Provide visual context and depth perception.
- IMU (Inertial Measurement Unit): Measures acceleration and rotation (like an inner ear) for balance.
- Proprioception: Sensors measuring internal state, like joint angles and motor currents.
2. Cognition (Thinking)
Once sensory data is collected, the robot must process it to:
- Localize itself (Where am I?).
- Map the environment (What does the world look like?).
- Plan actions (How do I get to the goal?).
- Reason about uncertainty and making decisions.
3. Action (Actuation)
Finally, the robot must execute actions in the physical world through Actuators (motors, grippers, muscles). Actions range from simple locomotion (walking, rolling) to complex manipulation (grasping, assembling).
Physical AI actions have consequences. Unlike a software undo button, a physical error (like dropping an object) cannot be easily reversed.
Challenges Unique to Physical AI
- Real-World Complexity: The real world is messy. Sensors have noise, lighting changes, and physics is unforgiving (friction, gravity).
- Real-Time Capabilities: A robot must react instantly. Latency can be dangerous—a delayed braking command could cause a crash.
- Sim-to-Real Gap: Models trained in perfect simulations often fail in the real world due to subtle physical differences.
Real-World Applications
- Manufacturing: Collaborative robots (cobots) working alongside humans.
- Healthcare: Surgical robots and exoskeletons for rehabilitation.
- Agriculture: Autonomous harvesting and crop monitoring drones.
- Exploration: Rovers navigating Mars or underwater drones inspecting infrastructure.
The Sense-Think-Act Loop
At the heart of every Physical AI system is the sense-think-act loop:
- Sense: Gather data from sensors.
- Think: Process data, update world model, plan action.
- Act: Execute motor commands.
- Repeat: This happens continuously, often at 10-100 times per second (Hz).
graph LR
A[Sense: Sensors] -->|Raw Data| B[Think: AI & Planning]
B -->|Commands| C[Act: Actuators]
C -->|Feedback| A
style A fill:#a855f7,stroke:#9333ea,stroke-width:2px,color:#fff
style B fill:#ec4899,stroke:#db2777,stroke-width:2px,color:#fff
style C fill:#06b6d4,stroke:#0891b2,stroke-width:2px,color:#fff
Python Code Example: The Loop
Here is a conceptual example of this loop in code:
import time
import random
class Robot:
def __init__(self):
# Initialize sensors and actuators
self.lidar_range = 10.0
def sense(self):
"""Gather sensor data (Sensors)"""
# Simulate sensor noise and reading
noise = random.uniform(-0.1, 0.1)
actual_distance = 5.0
return max(0.0, actual_distance + noise)
def think(self, sensor_data):
"""Process data and plan (Cognition)"""
# Simple logic: avoid obstacles closer than 1 meter
if sensor_data < 1.0:
return "STOP"
else:
return "MOVE_FORWARD"
def act(self, command):
"""Execute command (Actuators)"""
print(f"Action: {command}")
def run(self, frequency_hz=1):
"""Main control loop"""
period = 1.0 / frequency_hz
print(f"Starting Control Loop at {frequency_hz} Hz...")
try:
while True:
start_time = time.time()
# 1. SENSE
data = self.sense()
print(f"Sensor: {data:.2f}m", end=" | ")
# 2. THINK
decision = self.think(data)
# 3. ACT
self.act(decision)
# Maintain loop frequency
elapsed = time.time() - start_time
if elapsed < period:
time.sleep(period - elapsed)
except KeyboardInterrupt:
print("\nStopping robot.")
if __name__ == "__main__":
bot = Robot()
bot.run()
Self-Assessment Questions
-
What distinguishes Physical AI from traditional software-based AI?
Details
Answer
Physical AI is embodied in robots and interacts with the real world, dealing with physics and real-time constraints. Traditional AI operates in digital, static environments. -
Name the three pillars of Physical AI.
Details
Answer
Perception (Sensing), Cognition (Thinking), and Action (Actuation). -
Why is real-time processing critical?
Details
Answer
Because physical events happen continuously. A delay in processing sensor data can lead to collisions or failures as the environment changes while the robot is "thinking".
Summary
Physical AI requires Embodied Intelligence—the ability to plan and act while respecting the constraints of the physical body and environment. It operates on a continuous Sense-Think-Act loop and is transforming how machines help us in the real world.